Context Switch
ra(x1) saved by _swtch,
And _swtch should act like an ‘nop’
And tp is never used by compiler
ra(x1) saved by _swtch,
And _swtch should act like an ‘nop’
And tp is never used by compiler
cf. https://wiki.qemu.org/Hosts/W32
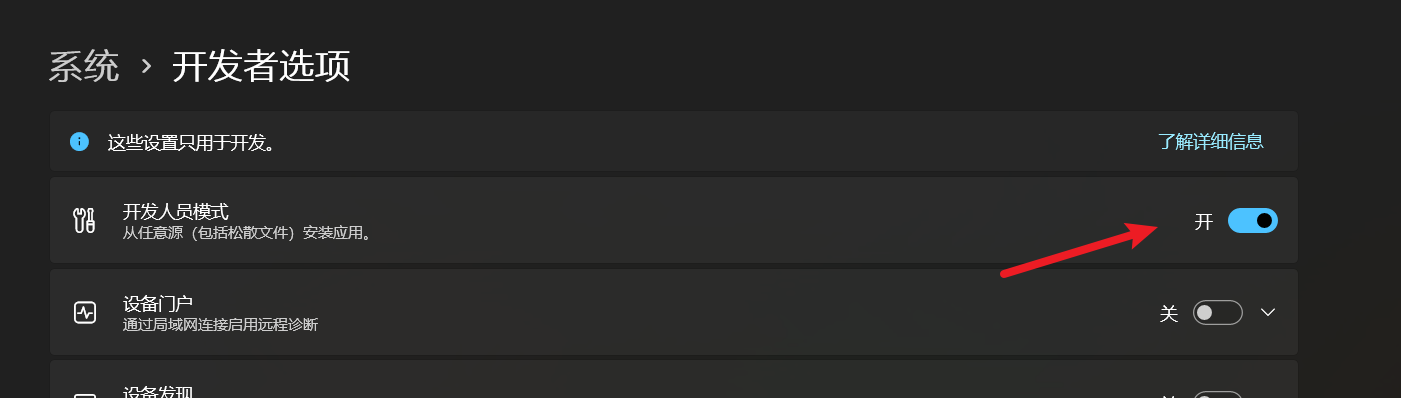
pacman -S mingw-w64-x86_64-gcc mingw-w64-x86_64-glib2 mingw-w64-x86_64-gettext-runtime mingw-w64-x86_64-gcc mingw-w64-x86_64-binutils mingw-w64-x86_64-pixman mingw-w64-x86_64-SDL2 mingw-w64-x86_64-gtk3 mingw-w64-x86_64-riscv64-unknown-elf-gcc mingw-w64-x86_64-gdb-multiarch git diffutils zsh vim)Please enable Developer Mode to support soft link without Administrator permission, otherwise it prompts
Found ninja-1.12.1 at D:/msys64/usr/bin/ninja.exe
Running postconf script 'D:/ZJUI/ECE391/qemu/build/pyvenv/bin/python3.exe D:/ZJUI/ECE391/qemu/scripts/symlink-install-tree.py'
Please enable Developer Mode to support soft link without Administrator permission
error making symbolic link D:/msys64/opt/toolchains/riscv/lib/libfdt.a
Traceback (most recent call last):
File "D:/ZJUI/ECE391/qemu/scripts/symlink-install-tree.py", line 35, in <module>
raise e
File "D:/ZJUI/ECE391/qemu/scripts/symlink-install-tree.py", line 28, in <module>
os.symlink(source, bundle_dest)
OSError: [WinError 1314] 客户端没有所需的特权。: 'D:/ZJUI/ECE391/qemu/build/subprojects/dtc/libfdt/libfdt.a' -> 'qemu-bundle/msys64/opt/toolchains/riscv/lib/libfdt.a'
./configure --prefix=/opt/toolchains/riscv --target-list=riscv32-softmmu,riscv64-softmmu --enable-gtk --enable-system --disable-werror
make -j
make installChange zsh for MINGW session https://superuser.com/questions/961699/change-default-shell-on-msys2
sh -c "$(curl -fsSL https://raw.githubusercontent.com/ohmyzsh/ohmyzsh/master/tools/install.sh)"Set in mingw64.ini:
SHELL=/usr/bin/zshThere is no PTS on windows so use telnet instead
source:https://www.uni-koeln.de/~pbogusze/posts/QEMU_serial_console.html
qemu-system-riscv64 -machine virt -bios none -kernel cp1.elf -m 8M -nographic -serial mon:stdio -serial telnet:localhost:4321,server,nowaitAdd D:\msys64\mingw64\bin to PATH of Windows
Then telnet to attach to con1
telnet localhost 4321CSR can’t be accessed directly, thus those instructions are needed.
Only 6 instructions, CSR[RS,RC,RW,RSI,RCI,RWI],I is immediate.
S for set, C for clear, W for write, other mnemonic(e.g. CSRR/CSRW) are pseudo-instructions with either rs1=x0 or ds=x0.
For both CSRRS and CSRRC, if rs1=x0, then the instruction will not write to the CSR at all
For both CSRRSI and CSRRCI, if uimm[4:0] field is zero, then the instruction will not write to the CSR at all
But CAVEAT LECTOR!, if rs1=x0 or uimm[4:0]=0 for CSRRW or CSRRWI, then csr will be CLEARED
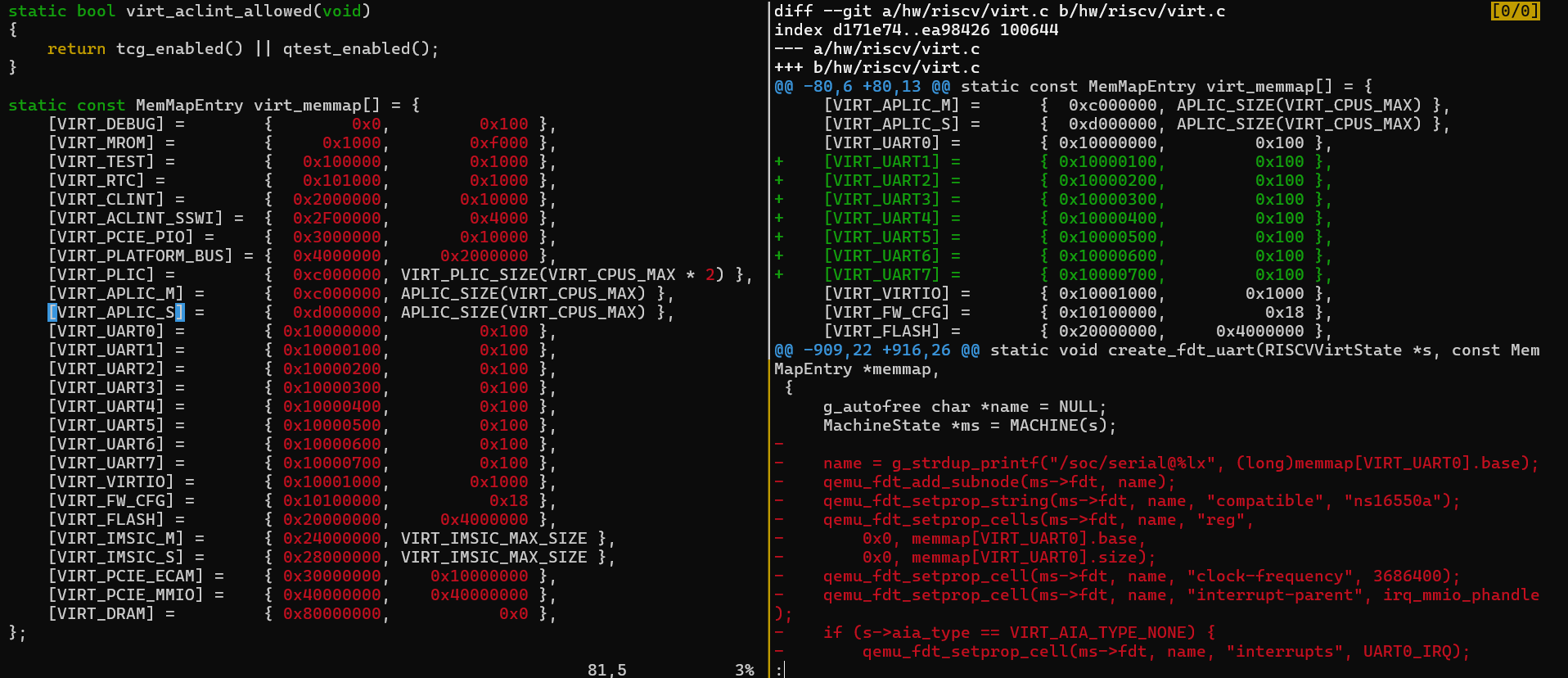
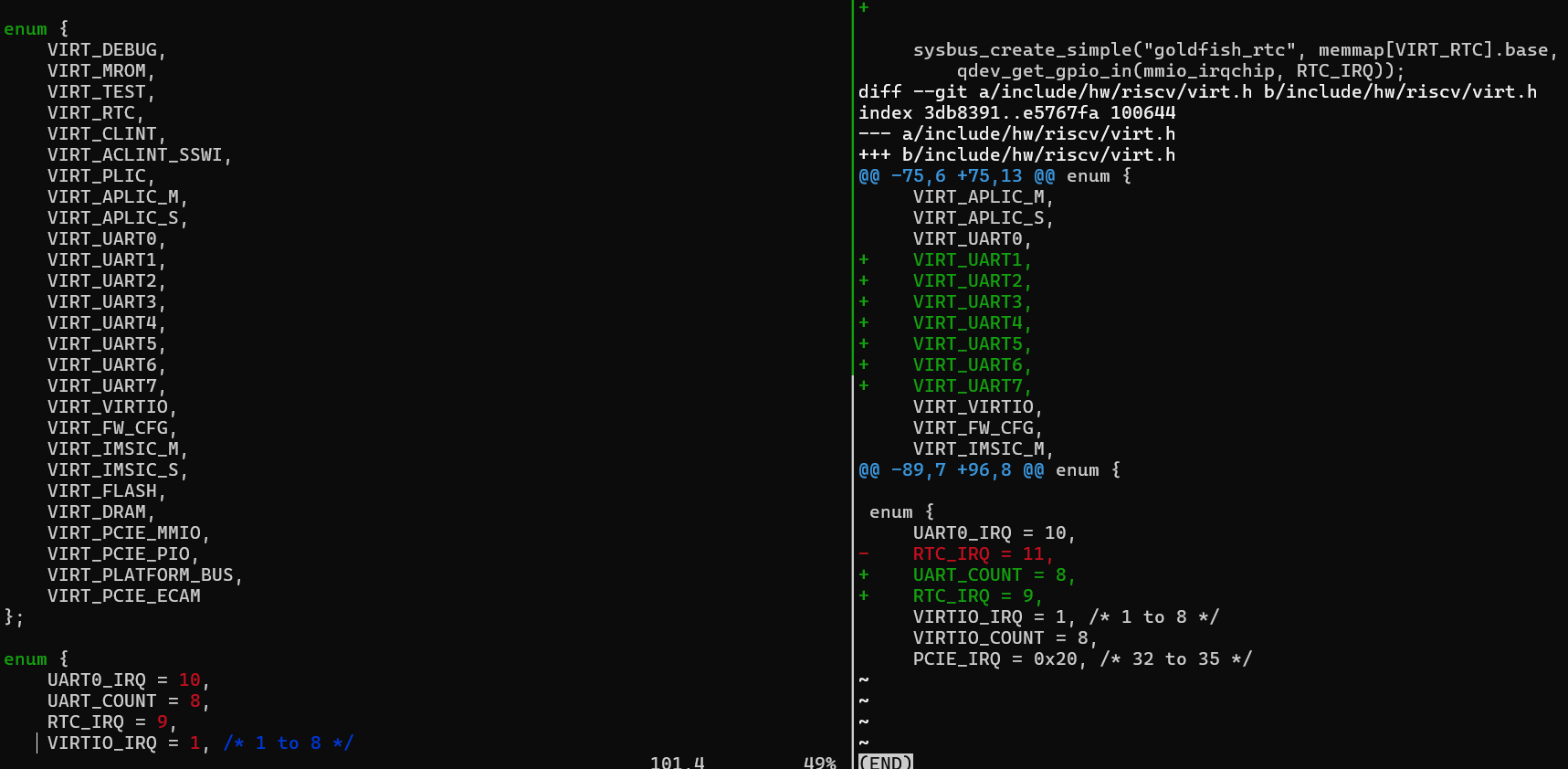
It is modified based on https://github.com/qemu/qemu/blob/master/hw/riscv/virt.c
7 uarts are added and IRQ number of RTC is moved to 9
\n\t to seperate assembly instructions in a single Assembly Template, delimiter
[ [asmSymbolicName] ] constraint (cexpression)Output:
[ [asmSymbolicName] ] constraint (cvariablename)assembler template by enclosing it in square brackets (i.e. %[Value]). The scope of the name is the asm statement that contains the definition. Any valid C variable name is acceptable, including names already defined in the surrounding code. No two operands within the same asm statement can use the same symbolic name.zero-based) position of the operand in the list of operands in the assembler template. For example if there are two output operands and three inputs, use %2 in the template to refer to the first input operand, %3 for the second, and %4 for the third.For example
uint32_t Mask = 1234;
uint32_t Index;
asm ("bsfl %[aMask], %[aIndex]"
: [aIndex] "=r" (Index)
: [aMask] "r" (Mask)
: "cc");if no asmSymbolicName
__asm__ ("btsl %2,%1\n\t" // Turn on zero-based bit #Offset in Base.
"sbb %0,%0" // Use the CF to calculate old.
: "=r" (old), "+rm" (*Base)
: "Ir" (Offset)
: "cc");
return old;output registers begin with 0, the number of input regs are after output regs.
If using I(immediate) as constraint, the input value must be known at assembly time or later.
mstatus:
mip:
mie:
mtvec:
mcause:
mepc:
Each source has a priority(0 is disabled, higher for high prio).
destination is a contex, which is a HART combined with mode(M/S)
every context (e.g. context 0) has a source enable(not prio).
PLIC Indicates which interrupt source raised the interrupt by
When CPU is finished servicing the itnerrupt, it signals completion to the PLIC
Allow Breakpoints Everywhere Vscode 在汇编文件中添加调试断点
ASFLAGS = -g
在workspace下.vscode下新建启动文件与任务文件launch.json, tasks.json
在miDebuggerPath 填riscv-gdb绝对路径,program填要调的程序
{
// Use IntelliSense to learn about possible attributes.
// Hover to view descriptions of existing attributes.
// For more information, visit: https://go.microsoft.com/fwlink/?linkid=830387
"version": "0.2.0",
"configurations": [
{
"name": "Debug RISC-V",
"type": "cppdbg",
"request": "launch",
"program":"${workspaceFolder}/demo.elf",
"cwd": "${workspaceFolder}",
"miDebuggerPath": "/opt/toolchains/riscv/bin/riscv64-unknown-elf-gdb",
"miDebuggerServerAddress": "localhost:1234",
"stopOnEntry": true,
"preLaunchTask": "Run QEMU"
}
]
}在command中修改调试器启动参数,修改对应启动elf文件。不要删除前面的一条命令echo 'QEMU started',这个是为了让vscode结束启动等待用
{
// See https://go.microsoft.com/fwlink/?LinkId=733558
// for the documentation about the tasks.json format
"version": "2.0.0",
"tasks": [
{
"label": "Build",
"type": "shell",
"command": "make",
"args": [
""
],
"group": {
"kind": "build",
"isDefault": true
},
"problemMatcher": [
"$gcc"
]
},
{
"label": "Run QEMU",
"type": "shell",
"command": "echo 'QEMU started';qemu-system-riscv64 -s -S -machine virt -bios none -kernel demo.elf -m 128M -serial mon:stdio -device bochs-display",
"dependsOn": ["Build"],
"args": [],
"group": {
"kind": "test",
"isDefault": true
},
"isBackground": true,
"problemMatcher": [
{
"pattern": [
{
"regexp": ".",
"file": 1,
"location": 2,
"message": 3
}
],
"background": {
"activeOnStart": true,
"beginsPattern": ".",
"endsPattern": ".",
}
}
]
}
]
}